Stabilizer IMU / GPS Tracker and Image
by Siou
email: laurent (dot) siou (at) orange (dot) fr
Summary |
Subject
The project is to create an electronic and mechanical design to:
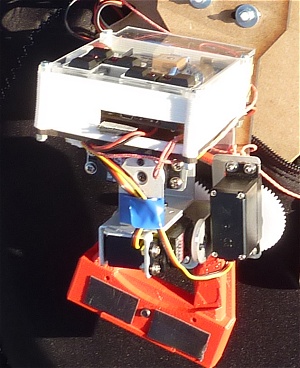
1) Stabilize a camera mounted on a flying machine. Rotations of the three axes must be canceled.
2) Locking a ground target to shoot. The system will use 3D positioning calculations.
3) Locking a flying target for filming. The system will use image processing calculations.
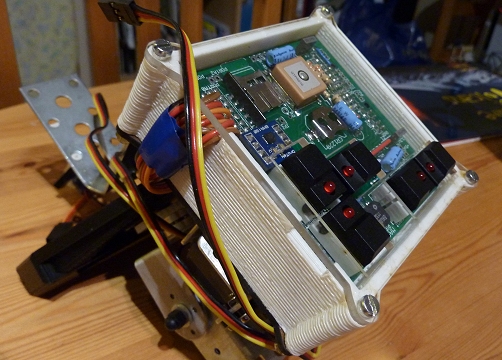
The prototyping hardware is using an FPGA (Papillio board 250K) in which we implement an Arduino IDE (core AVR8). The mechanical part consists of three servo motors. The sensor part includes a gyroscope, an accelerometer, a magnetometer and GPS.
The aim is, among others, to practice writing VHDL with new hardware IP, IP reuse through an original project.
Principle

Specifications
- Mechanics:
Weight: Servos and structure: 380g, Electronics: 180g, APN: 220g Batteries: 200g, Total: 980g
- Electronics:
FPGA Xilink Spartan 3E FPGA 250k, Custom wing board, ITG3200, BMA180, HMC5883, SDCard 4Go, GPS mediatek
Project Status
- 3-axis stabilization works in combination (orientation down)
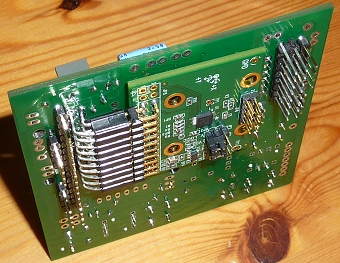
- Final electronic board fully tested.
- Final mechanical configuration completed.
- Flight tests started.
Steps done
- Creation Papillio daughter card: Component selection, placement, final PCB layout.Manufacturing.